Dynamic touch-demonstrations
Author: Dr. David Travieso (UAM)
The following REPAIRS toolbox is available under the CC-BY licence (Creative Commons: https://creativecommons.org/). This implies that others are free to share and adapt our works under the condition that appropriate credit to the original contribution (provide the name of the REPAIRS consortium and the name the authors of the toolbox when available, and a link to the original material) is given and indicate if changes were made to the original work.
This toolbox is a continuation of the dynamic touch theory toolbox (https://repairs-etn.eu/dynamic-touch-theory/) and contains instructions for a practical session that can be used when teaching about the dynamic touch together with links where the required materials can be obtained from.
Activity 1. A classic illusion: The size-weight illusion (individual)
Let us start by a simple experience with the so-called size-weight illusion. The psychophysical tradition has studied our perception of weight (mass), to the point that since Stevens (1957) it is said that our perception of weight can be described with the following potential function:
S = k Ec
Where the exponent c equals 1.45 for lifted weights. That is, our perception of weight increases accelerated with the increase of mass.
However, this equation was estimated maintaining the volume and form of the estimated objects (and also the movements to estimate), increasing only their mass and, therefore, their density.
Let’s try a different variation. That of volume.
Method
Materials
Cardboard box & Nut
Steps
This experience can be self-administered without affecting it.
- Build up the cardboard box supplied as material for this experience (section “Materials for the demonstration”).
- Weigh the nut on the palm.
- Weigh the nut inside the box on the palm
Description
- Describe the experience and the difference between both conditions.
- Try to give an explanation
Activity 2. Perceptual invariants in dynamic touch (groups of 3 participants).
We have previously stated that when analyzing perception, it is compulsory to search for the specific perceptual information or invariants that allow the perception of affordances. We also stated that we normally access that information through exploratory movements that are necessary to detect the information. Finally, we maintained that the information consists of high-order variables that extend in the spatial and temporal features of the energy arrays.
Throughout this demonstration, we will try to show the role of the different informational variables in dynamic touch (i.e., the moments of mass distribution) in the perception of different features of the object, as well as the role of the exploratory movements in the detection of these variables.
General method
Materials
The following materials will be used
- Four rods: length 30 cm; width 1 cm; weight 13 g.
- Three sets of: Nut + 2 O-rings: weight 15 g.
Experimental design
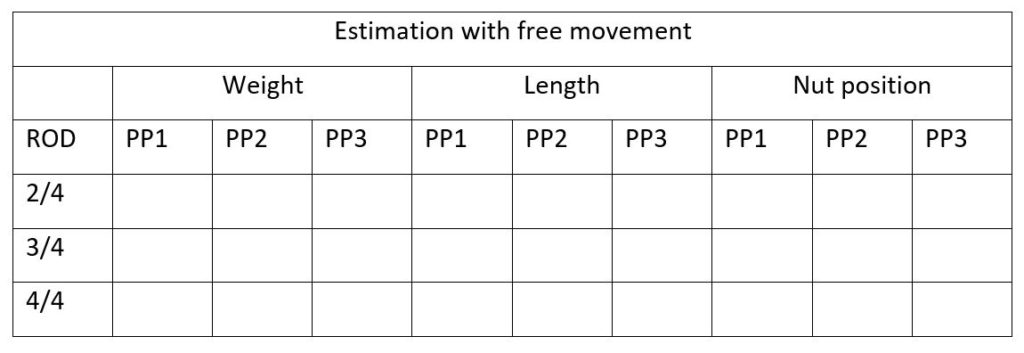
We will use a magnitude estimation task consisting in asking perceivers to give numbers to the perceived magnitudes of the objects (length, weight, etc.). We will give the perceivers a clean rod, which acts as reference, and give it an arbitrary value of 50. The perceiver will then perform the estimations (giving numbers according to the reference) to different rods, under three conditions of exploration: performing only up and down movements, holding the rod horizontally against gravity, and freely wielding the object.
Procedure
One of the members of the group will act as researcher and another as participant of the experiment. The third one will register the answers. Roles will rotate.
Steps
1. Fix a nut with the O-rings on three different rods at: 2/4, 3/4, and 4/4 along their length.
2. Give a clean rod to the perceiver and allow her to freely estimate its properties by wielding it with one hand. Give it a value of 50 for the intended magnitude.
3. Randomly choose the order of presentation of the three experimental rods and give them successively to the perceiver.
4. The perceiver will explore the rod with the assigned exploration condition and inform the perceived magnitude using the reference.
“If the reference magnitude is 50, this one is… (100 if it is double magnitude, 25 if it is a half)”
5. Compare the estimations of weight, length, and nut position with the values of the mechanical magnitudes that can be found in Annex 1.
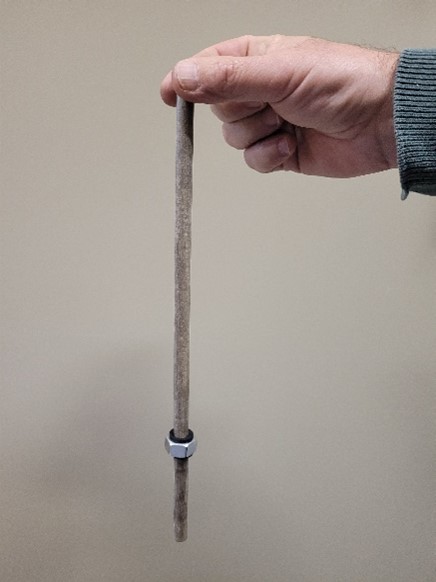
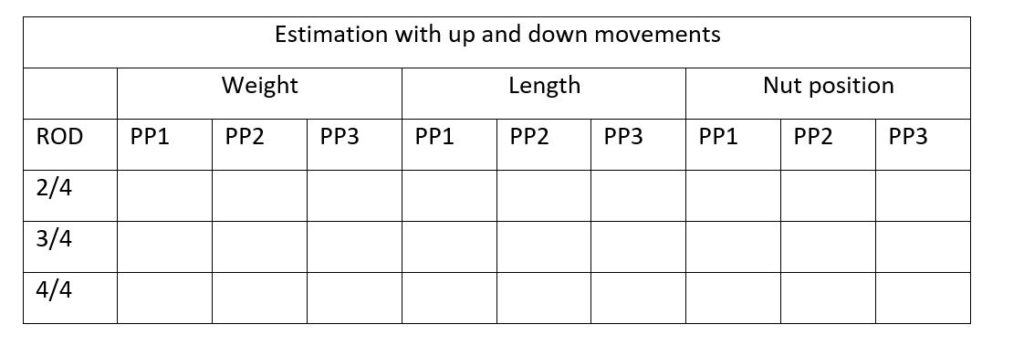
First experimental task
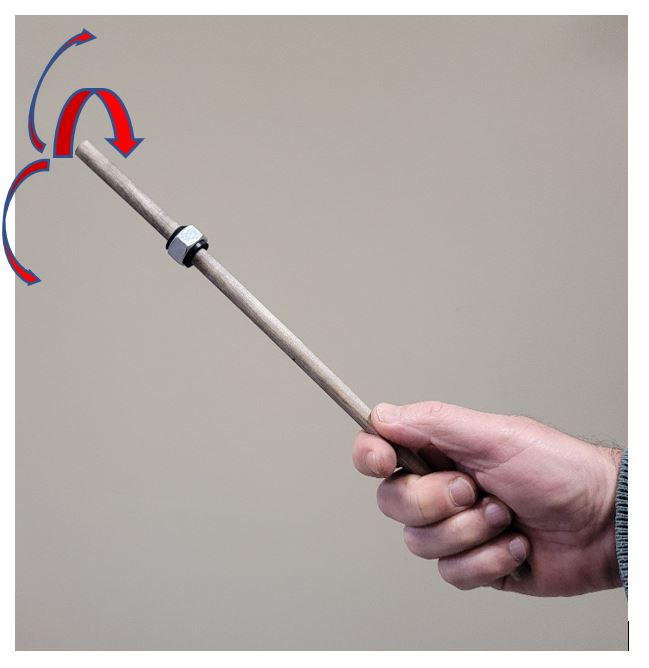
Exploration condition: hold the rod with an index finger and thumb grip from one of its ends and perform only up and down movements (translation) against gravity.
Results
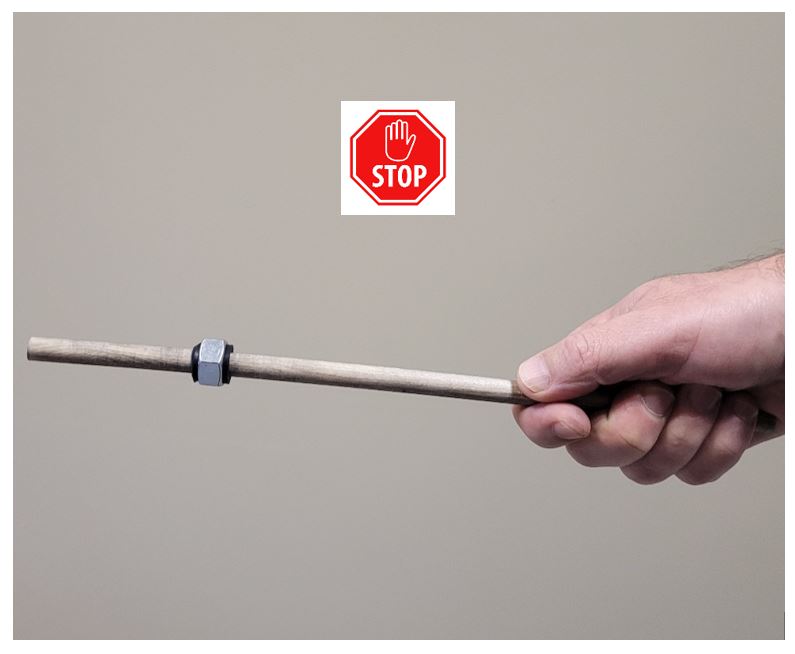
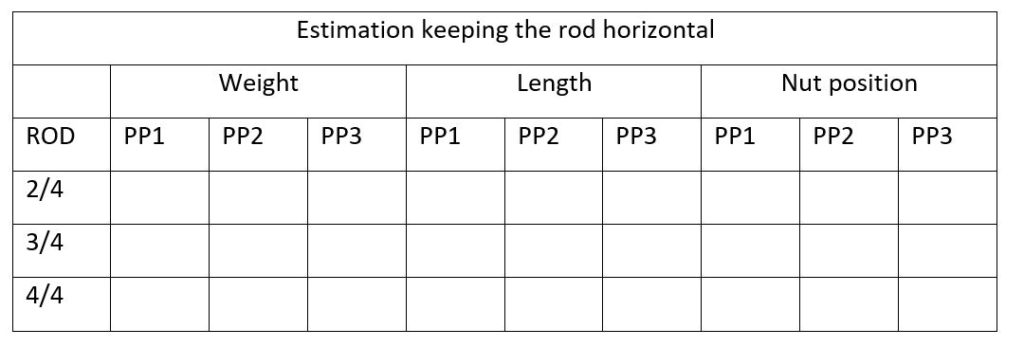
Second experimental task
Exploration condition: Handle the rod by one of its ends and keep it horizontal (without moving it).
Results
Third experimental task
Exploration condition: Handle the rod by one of its ends and wield it freely.
Results
Fourth task
GUESS: How can we disentangle static moment and the moment of inertia?
Cue: we have now TWO NUTS for each rod.
Suggest and perform a magnitude estimation or classification task that will allow to disentangle static moment and the first moment of inertia. In terms of exploratory behavior, a perceptual task that can differentiate between the perceptual abilities while keeping the object horizontal against gravity and moving it freely.
- Describe the appropriate stimuli of the task and the rationale for them.
- Describe the hypothesis
- Discuss the possible results
Materials for the demonstrations
- Cardboard box
An appropriate cardboard box can be found in: https://amzn.eu/d/0Q8vJP5

2. Nuts
Appropriate nuts can be found in: https://amzn.eu/d/htBRqhn
3. Rods
Appropriate wood sticks can be found in: https://amzn.eu/d/65Gu5d8

4. O-rings
Appropriate O-rings can be found in: https://amzn.eu/d/19IApBa

Annex 1
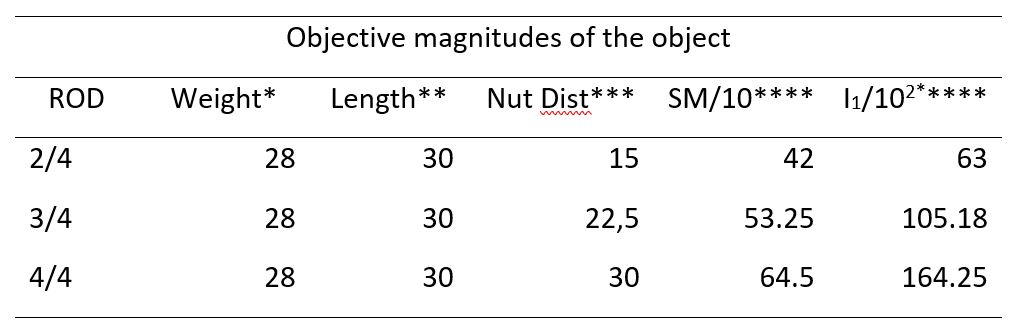
* Weight was calculated as the sum of the weight of rod, nut, and two O-rings in g.
** Length of the rod in cm.
*** Nut distance to the point of rotation in cm.
**** static moment of the object: mass of rod by the distance of its center of mass to the point of rotation plus mass of nut + O-rings by their distance to the point of rotation
***** I1 (first moment of inertia). Calculated as mass of the rod by the squared distance of its center of mass to the point of rotation plus mass of nut + O-rings by their squared distance to the point of rotation.
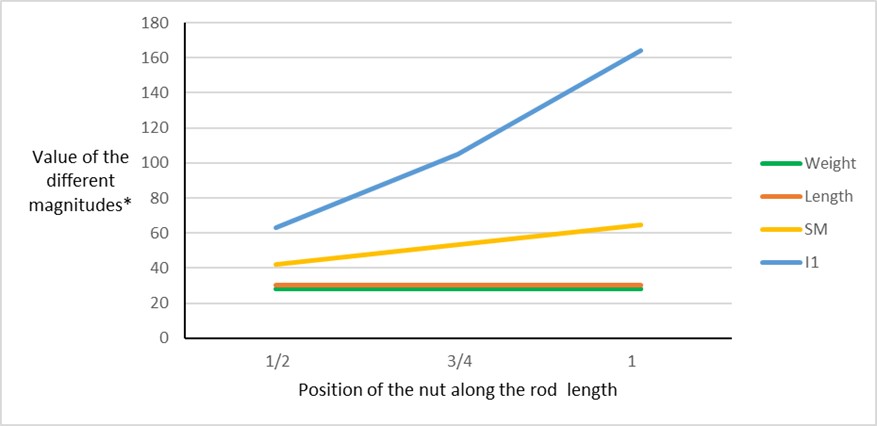
* Magnitudes differ for the different properties: weight (g), length (cm), static mass (g*cm), I1 (g*cm2).
References
Burton, G., Turvey, M. T., & Solomon, H. Y. (1990). Can shape be perceived by dynamic touch?. Perception & Psychophysics, 48(5), 477-487.
Carello, C., Fitzpatrick, P., Flascher, I., & Turvey, M. T. (1998). Inertial eigenvalues, rod density, and rod diameter in length perception by dynamic touch. Perception & Psychophysics, 60(1), 89-100.
Carello, C., & Turvey, M. T. (2017). Useful dimensions of haptic perception: 50 years after the senses considered as perceptual systems. Ecological Psychology, 29(2), 95-121.
Gibson, J. J. (1966). The senses considered as perceptual systems. Boston, MA: Houghton Mifflin.
Gibson, J. J. (1979). The ecological approach to visual perception. Hillsdale, NJ: Erlbaum.
Harrison, S. J., Hajnal, A., Lopresti-Goodman, S., Isenhower, R. W., & Kinsella-Shaw, J. M. (2011). Perceiving action-relevant properties of tools through dynamic touch: effects of mass distribution, exploration style, and intention. Journal of Experimental Psychology: Human Perception and Performance, 37(1), 193-206.
Hajnal, A., Fonseca, S. T., Harrison, S., Kinsella-Shaw, J. M., & Carello, C. (2007). Comparison ofdynamic (effortful) touch by hand and foot. Journal of Motor Behavior, 39, 82–88.
Kingma, I., Van De Langenberg, R., & Beek, P. J. (2004). Which mechanical invariants are associated with the perception of length and heaviness of a nonvisible handheld rod? Testing the inertia tensor hypothesis. Journal of Experimental Psychology: Human Perception and Performance, 30(2), 346-354.
Lee, D. N. (978). The functions of vision. In H. L. Pick & E. Saltzman (Eds.), Modes of perceiving and processing information. Hillsdale, N.J.: Erlbaum.
Mantel, B., Stoffregen, T. A., Campbell, A., & Bardy, B. G. (2015). Exploratory movement generates higher-order information that is sufficient for accurate perception of scaled egocentric distance. PloS one, 10(4), e0120025.
Michaels, C. F., Arzamarski, R., Isenhower, R. W., & Jacobs, D. M. (2008). Direct learning in dynamic touch. Journal of Experimental Psychology: Human Perception and Performance, 34(4), 944-957.
Pagano, C. C., Carello, C., & Turvey, M. T. (1996). Exteroception and exproprioception by dynamic touch are different functions of the inertia tensor. Perception & psychophysics, 58(8), 1191-1202.
Pagano, C. C., & Turvey, M. T. (1995). The inertia tensor as a basis for the perception of limb orientation. Journal of experimental psychology: Human perception and performance, 21(5), 1070-1087.
Palatinus, Z., Carello, C., & Turvey, M. T. (2011). Principles of part–whole selective perception by dynamic touch extend to the torso. Journal of Motor Behavior, 43(2), 87-93.
Richardson, M. J., Shockley, K., Fajen, B. R., Riley, M. A., & Turvey, M. T. (2008). Ecological psychology: Six principles for an embodied–embedded approach to behavior. In Handbook of cognitive science (pp. 159-187). Elsevier.
Solomon, H. Y., & Turvey, M. T. (1988). Haptically perceiving the distances reachable with hand-held objects. Journal of experimental psychology: Human perception and performance, 14(3), 404-427.
Turvey, M. T. (1996). Dynamic touch. American Psychologist, 51, 1134-1152.
Turvey, M. T., Burton, G., Pagano, C. C., Solomon, H. Y., & Runeson, S. (1992). Role of the inertia tensor in perceiving object orientation by dynamic touch. Journal of Experimental Psychology: Human Perception and Performance, 18(3), 714-727.
Turvey, M. T., & Carello, C. (2011). Obtaining information by dynamic (effortful) touching. Philosophical Transactions of the Royal Society of London B: Biological Sciences, 366(1581), 3123–3132. doi:10.1098/rstb.2011.0159
van de Langenberg, R., Kingma, I., & Beek, P. J. (2006). Mechanical invariants are implicated in dynamic touch as a function of their salience in the stimulus flow. Journal of Experimental Psychology: Human Perception and Performance, 32(5), 1093-1106.
Wagman, J. B., & Hajnal, A. (2014). Task-specificity and anatomical independence in perception of surface properties by means of a wielded object. Journal of Experimental Psychology: Human Perception & Performance, 40, 2372–2391.
Withagen, R., & Michaels, C. F. (2005). The role of feedback information for calibration and attunement in perceiving length by dynamic touch. Journal of Experimental Psychology: Human Perception